一、系统简介
冶金行业的炼铁高炉的巡视和检修工作大部分都由人工完成,而该场所中环境恶劣、温度高、含有毒有害气体,对人工巡视造成非常大的阻碍;同时由于人工巡检频率低、间隔长、在设备运行过程中因安全原因不能巡检等因素,影响待巡检设备的日常检查、维护保养等。
针对以上问题,开发以可沿轨道自由运行的高可靠性移动载体+智能控制算法+基于深度学习的检测算法+分布式服务架构系统等核心技术的矿用轨道式智能巡检机器人系统,为冶金行业提供创新智能巡检、智能监控及智能预警的解决方案。
二、功能特点
1、视觉识别:搭载高清可见光相机,基于深度学习的视觉算法,实现送风装置漏粉、漏水监测;
2、红外测温:鹅颈管、补偿器、直吹管、弯头等设备的超温监测;
3、环境监测:集成温湿度、气体等多传感器,采集现场环境参数,实时监控现场环境状态;
4、自主充电:充电方式采用无线充电,设定低电量阀值,机器人电量低于设定阀值,可返回充电点自主充电;
5、遇障停车:搭载超声波雷达、机械式防碰撞条及电机电流监测,具备多级制动、防碰撞功能;
6、自主巡检:监控平台可根据巡检需求,通过增删改查定制巡检任务。
三、技术参数
|
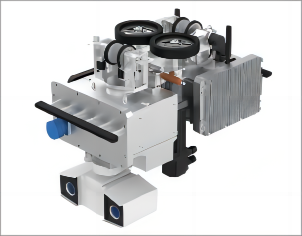
高炉作业区在线智能巡检机器人 |
|
|
驱动形式 |
挂轨式 |
|
额定运行速度 |
≤1m/s,0~1m/s可调 |
|
爬坡能力 |
≤20° |
|
最小转弯半径 |
800mm |
|
云台升降行程 |
1.5m |
|
供电方式 |
锂电池供电 |
|
续航里程 |
2km |
|
充电方式 |
自主充电/无线充电 |
|
防护等级 |
IP65 |
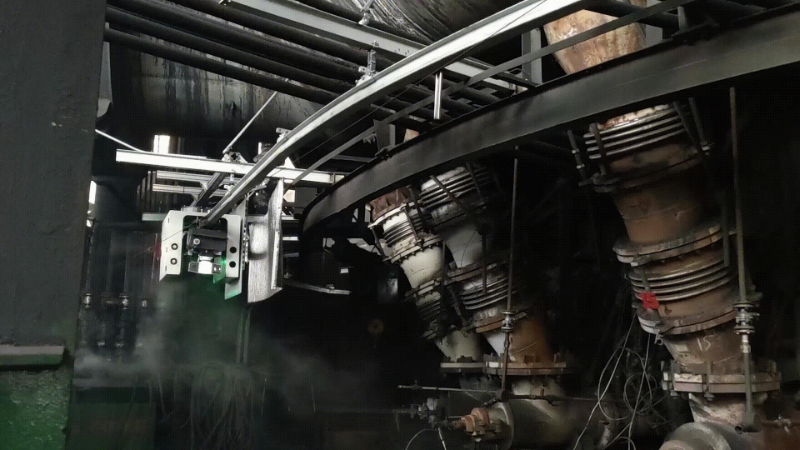
四、应用实景

项目来源 | 泉州两创院科技有限公司