一、产品简介
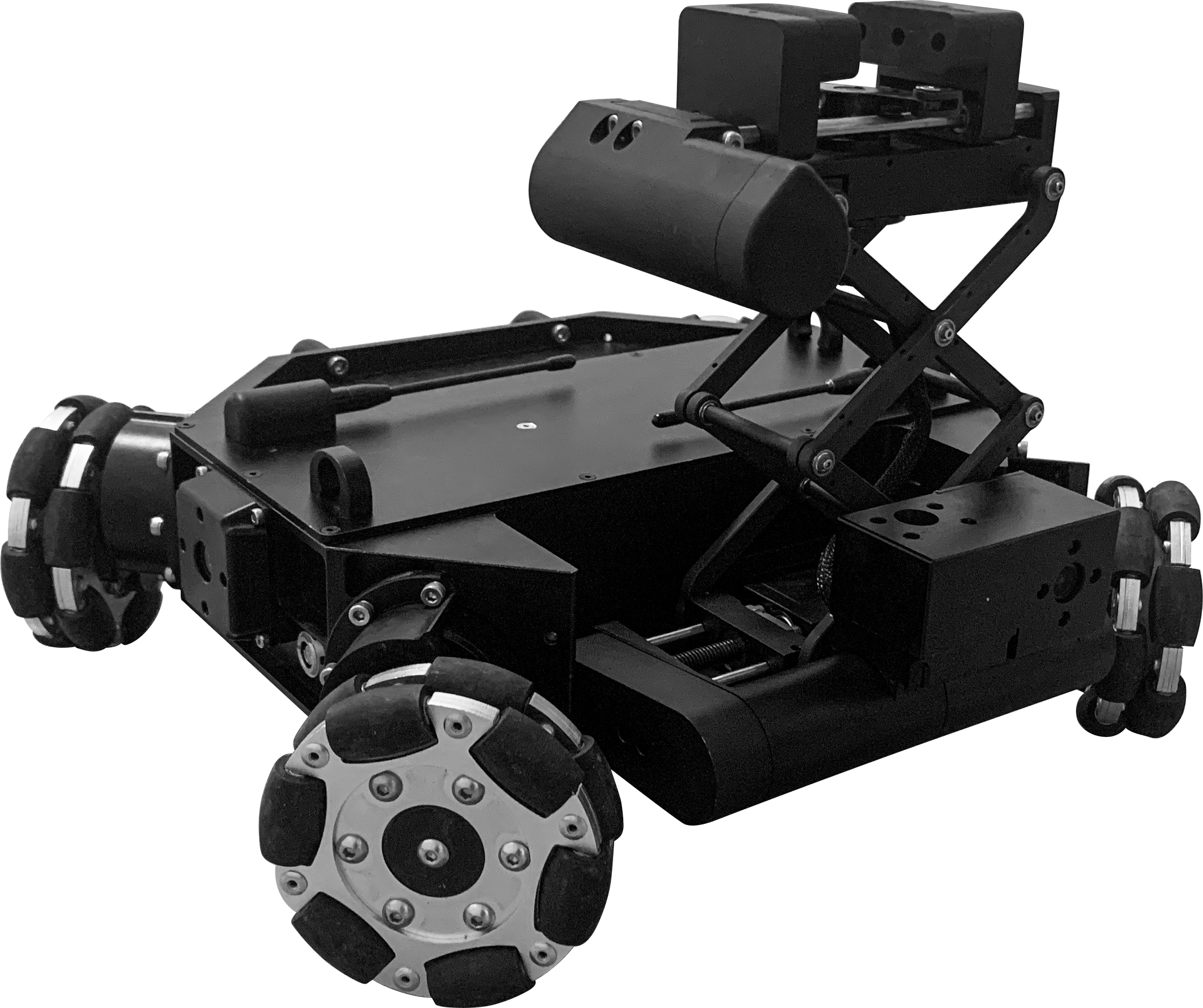
车底检查机器人由车底检查移动机器人本体和远程操控终端组成。移动本体由四个独立驱动的全向轮底盘、两个自由度的小型机械手,电源系统以及四路低照度彩色摄像头组成。机械手可将带磁吸附的信标放置到目标车辆底部,以便进行跟踪追查,也可以通过此小型机械手进行危险品的拆除。四路低照度彩色摄像头可以画中画同时显示。远程操控终端由手持显控终端、无线通信系统以及电源供电系统组成。
该产品可对静止车辆底盘进行扫描成像,显示车辆底盘整幅高清图像;可通过无线控制终端,对设备进行自动或手动控制;设备可自动移至所指定车底嫌疑位置,进行局部定点观察,可显示车底整幅图像。
二、参数指标
|
基本参数 |
|
|
驱动形式 |
全向四轮独立驱动 |
|
质量 |
整备质量≤13kg 手臂总重量≤3kg |
|
底盘外形尺寸(长×宽×高) |
≤480×480×135mm |
|
抓取能力 |
≤3kg |
|
最大臂展 |
120mm |
|
最大速度 |
0.5m/s |
|
通信距离 |
无线100m可视距离 |
|
转弯半径 |
差速转向,可原地360°进行旋转 |
|
续航能力 |
采用电池供电,连续工作时长≥3h |
|
图像存储 |
≥5万幅图像,存储容量可配置 |
|
可扩展 |
支持扩展、集成,可与其它系统形成联动 |
|
车身最小离地间隙 |
40mm |
|
路面适应性 |
四级以上公路地面 |
|
电池可更换 |
在不使用专业工具的前提下,电池可进行拆卸和更换 |
|
操作终端 |
标配不低于10寸LCD屏,阳光直射可读 |
|
工作环境温度 |
-10°~+45℃ |
|
工作环境湿度 |
0~90%(不结露) |
项目来源 | 泉州两创院科技有限公司